Stewy
3DOF Stewart Platform
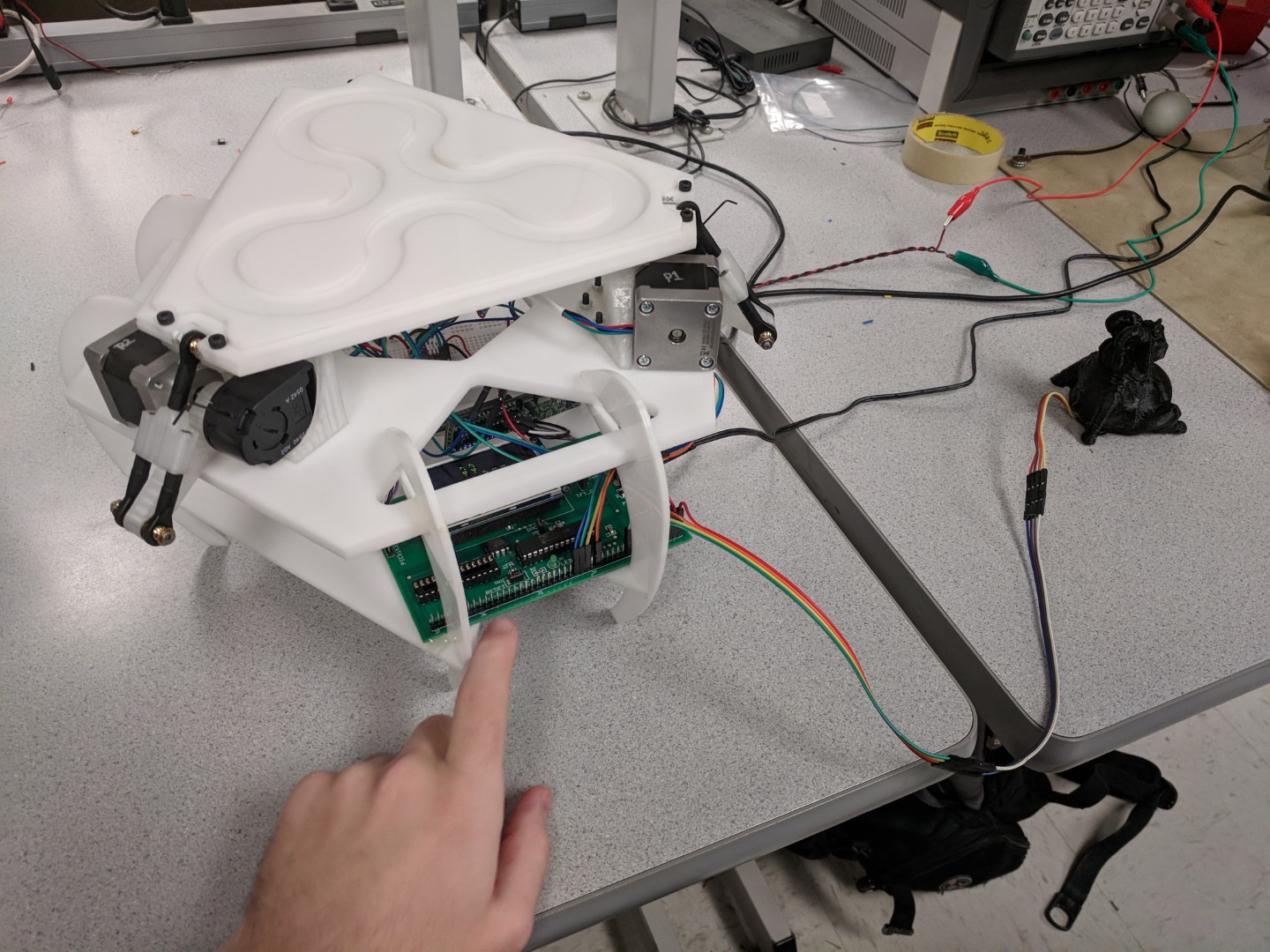
This three degree-of-freedom stewart platform, named “Stewy”, was a final project built for Bruce Land’s microcontrollers class. I took care of component selection, mechanical design, and the algorithm that controlled the stepper motors.
The platform was set up to mirror the attitude of a goat-shaped controller. The controller doubled as a mascot for our team, which we had previously dubbed the microgoats.
The project’s report/website can be found here.
Click here for Hackaday.com coverage.